Images presented here may not fully represent the product

Moduły inercyjne iNEMO łączą czujniki różnego typu, zapewniając bardziej kompaktowe, wytrzymałe i łatwiejsze w montażu rozwiązania w porównaniu z dyskretnymi układami MEMS. Moduły inercyjne zapewniają wyższą dokładność i niezawodność, mając jednocześnie rozmiary mniejsze nawet o 85% w zależności od wybranego rozwiązania.
Moduły inercyjne iNEMO łączą w sobie czujniki różnego typu, zapewniając bardziej kompaktowe, wytrzymałe i łatwiejsze w montażu rozwiązania w porównaniu z dyskretnymi układami MEMS. Moduły inercyjne zapewniają wyższą dokładność i niezawodności, mając jednocześnie rozmiary mniejsze nawet o 85% w zależności od wybranego rozwiązania. Rozwiązania sprzętowe i programowe iNEMO firmy ST obejmują:
Kompletny katalog rozwiązań iNEMO w zakresie osprzętu i oprogramowania zapewnia działanie systemów detekcji ruchu na poziomie wymaganym przez zaawansowane zastosowania tj. ulepszone rozpoznawanie gestów/gry, rozszerzona rzeczywistość, nawigacja wewnętrzna i usługi lokalizacyjne.
| Urządzenie | Obecność na rynku | Obudowa | Osie czujnika | Zakres (FS) (g) | Zakres przy pomiarze kątowym (FS) () | Zakres magnetyczny (M_FS) (Gauss) | Rodzaj wyjścia | Min. napięcie zasilania (VDD) (V) | Napięcie zasilania (VDD) (V) | Maks. napięcie zasilania (VDD) (V) | Gęstość zakłóceń przy pomiarze kątowym (Rn) (°/s/ √ Hz) | Pobór prądu (mA) | Pobór prądu (w trybie uśpienia) (mA) | Opis ogólny |
| ASM330LXH | Podgląd | VFLGA 3X3X1,1 16L PITCH 0,5 | X, Y, Z, odchylenie, rozstaw, obrót | ±2, ±4, ±8,±16 | 125 | - | Cyfrowe | 2 | 3 | 3,6 | 0,006 | 4,3 | 0,006 | Moduł inercyjny do zastosowania w przemyśle motoryzacyjnym: przyspieszeniomierz 3D i żyroskop 3D |
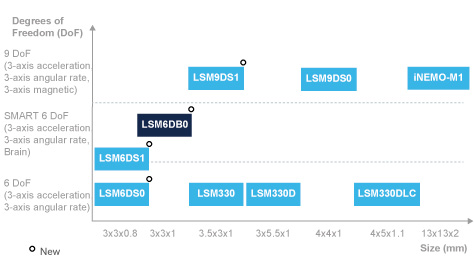
| INEMO-M1 | Tak | TRAY | X, Y, Z, odchylenie, rozstaw, obrót | +/-2; +/-4; +/-8; +/-16 | 2000 | 8,1 | Cyfrowe | 2,4 | 3,3 | 6 | 0,03 | 40 | 0,8 | Wbudowany system iNEMO |
| LSM330 | Tak | TFLGA 3,5X3X1 24L | X, Y, Z, odchylenie, rozstaw, obrót | ±2; ±4; ±6; ±8; ±16 | 2000 | - | Cyfrowe | 2,4 | 3 | 3,6 | - | 6,1 | 0,005 | Moduł inercyjny iNEMO: przyspieszeniomierz 3D i żyroskop 3D |
| LSM330D | Tak | LGA 3X5,5X1 28L PITCH 0,45 | X, Y, Z, odchylenie, rozstaw, obrót | ±2; ±4; ±8; ±16 | 2000 | - | Cyfrowe | 2,4 | 3 | 3,6 | - | 6,3 | 0,005 | Moduł inercyjny iNEMO: przyspieszeniomierz 3D i żyroskop 3D |
| LSM330DLC | Tak | TFLGA 4X5X1,1 28L | X, Y, Z, odchylenie, rozstaw, obrót | ±2, ±4, ±8, ±16 | 2000 | - | Cyfrowe | 2,4 | 3 | 3,6 | 0,03 | 6,1 | 0,002 | Moduł inercyjny iNEMO: przyspieszeniomierz 3D i żyroskop 3D |
| LSM6DB0 | Tak | VFLGA 3X3X1 22L | X, Y, Z, odchylenie, rozstaw, obrót | 2; 4; 8 | 2000 | - | Cyfrowe | 1,71 | - | 3,6 | - | - | - | Zaawansowany moduł inercyjny iNEMO: Przyspieszeniomierz 3D, żyroskop 3D i procesor sygnałów |
| LSM6DS0 | Tak | VFLGA 3X3X0,86 | X, Y, Z, odchylenie, rozstaw, obrót | 2; 4; 8 | 2000 | - | Cyfrowe | 1,71 | - | 3,6 | - | - | - | Moduł inercyjny iNEMO: przyspieszeniomierz 3D i żyroskop 3D |
| LSM6DS3 | Tak | VFLGA 2,5X3X0,86 14L | X, Y, Z, odchylenie, rozstaw, obrót | 2; 4; 8; 16 | 2000 | - | Cyfrowe | 1,71 | - | 3,6 | - | - | - | Moduł inercyjny iNEMO: przyspieszeniomierz 3D i żyroskop 3D |
| LSM9DS0 | Tak | LGA 4X4X1 24L | X, Y, Z, odchylenie, rozstaw, obrót | ± 2; ± 4; ±6; ± 8; ± 16 | 2000 | 12 | Cyfrowe | 2,4 | 3 | 3,6 | - | - | - | Moduł inercyjny iNEMO: przyspieszeniomierz 3D, żyroskop 3D i magnetometr 3D |
| LSM9DS1 | Tak | TFLGA 3,5X3X1 24L | X, Y, Z, odchylenie, rozstaw, obrót | +/-2; +/-4; +/-8; +/-16 | 2000 | 16 | Cyfrowe | 1,9 | 3 | 3,6 | - | - | - | Moduł inercyjny iNEMO: przyspieszeniomierz 3D, żyroskop 3D i magnetometr 3D |
korzystamy z usług firm kurierskich:

Adres:
ELTRON Spółka z ograniczoną
odpowiedzialnością Sp. k.
ul. Brodzka 10B
54-103 Wrocław
Kontakt:
Telefon: +48 71 343 97 55
E-mail: kontakt@eltron.pl
Znajdziesz nas na: